




Spesifikasiýa
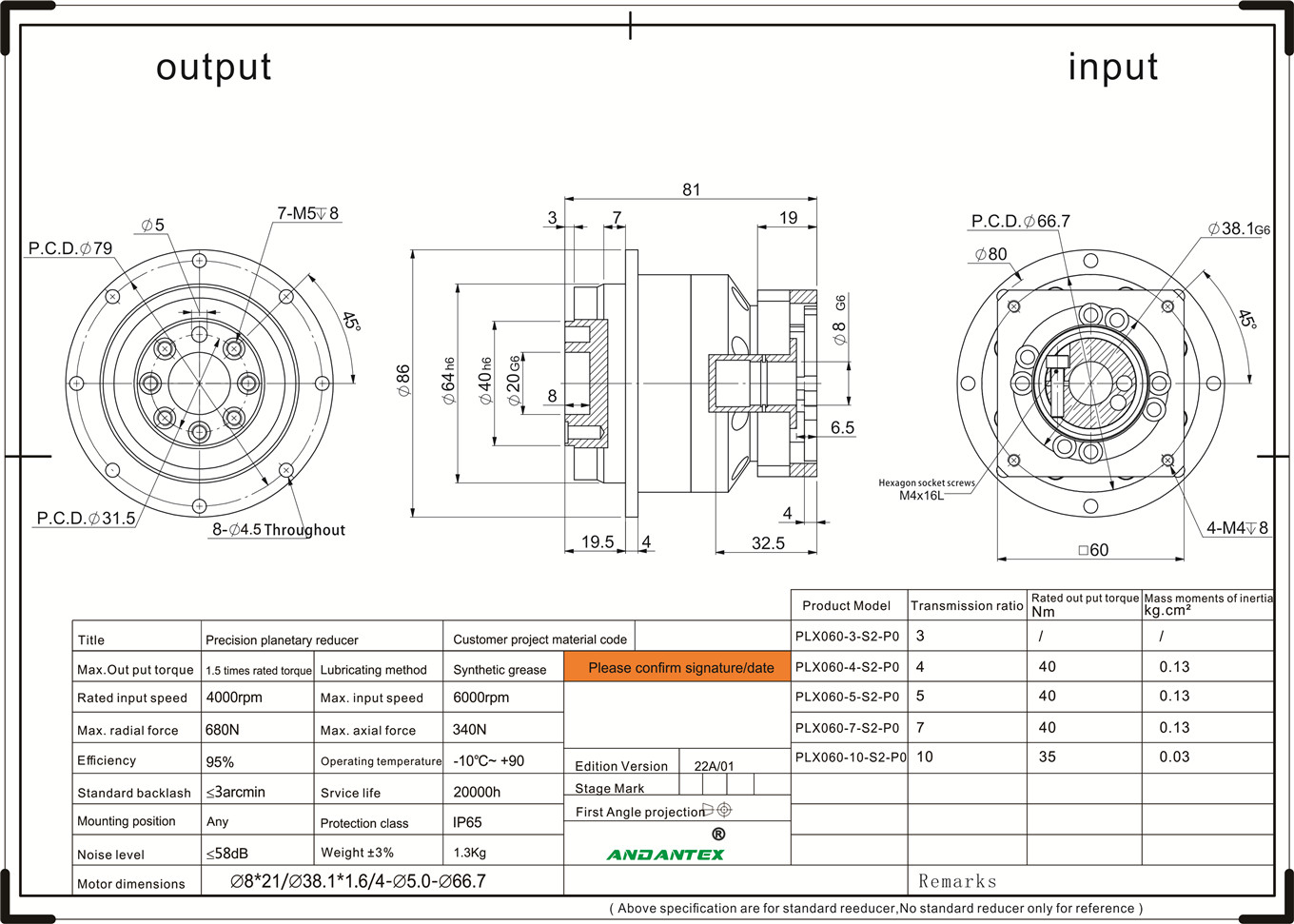
Aýratynlyklary

-Okary takyklykly disk reduktory, elektrik motorynyň ýokary aýlanma tizligini pes tizlikli, ýokary torkly çykyşa öwürmek üçin ýörite döredilen mehaniki enjamdyr. Esasy gurluşy diskden we dişli tapgyrlardan ybarat bolup, adatça ýokary takyklyk derejelerini we dürli önümçilik goşundylary üçin kiçi aýak yzyny görkezýär. Enjamyň dizaýny, az giňişlikde ýokary öndürijilikli güýji geçirmäge mümkinçilik berýär we häzirki zaman tehnikalarynyň we enjamlarynyň aýrylmaz bölegidir.
Goýmalar
Mehaniki enjamlarda ýokary takyklyk disk reduktorynyň roluna kembaha garap bolmaz. Birinjiden, awtomatlaşdyryş enjamlarynda möhüm rol oýnaýar. Akylly önümçilik we senagat 4.0 ösmegi bilen awtomatiki önümçilik liniýalary dürli senagat pudaklarynda köplenç ulanylýar. Highokary takyklykly disk reduktorlary bu enjamlar üçin takyk hereketi we ýerleşişi üpjün edýär, durnukly işlemegi we ýokary netijeliligi üpjün edýär. Mysal üçin, awtomatlaşdyrylan gurnama setirlerinde, dişli gutular takyk komponent ýerleşişini üpjün edýär, önümçiligiň umumy netijeliligini we önümiň yzygiderliligini ýokarlandyrýar.
Senagat robotlary ýokary takyklykly disk reduktorlary üçin ýene bir möhüm amaly meýdan. Kebşirlemek, işlemek we gurnamak ýaly dürli önümçilik amallarynda, dişli hereketlendiriji motoryň ýokary tizlikli aýlanmagyny pes tizlikli, ýokary torkly çykyşa öwürmek arkaly robotyň hereket ulgamynyň esasy bölegine öwrülýär. Robota ýokary takyklyk we durnuklylyk bilen çylşyrymly amallary ýerine ýetirmäge mümkinçilik berýär, şeýlelik bilen önümçilik prosesiniň awtomatlaşdyrylmagyny we önümiň hilini ýokarlandyrýar. Mundan başga-da, dişli gutynyň ygtybarlylygy we berkligi häzirki zaman önümçiligi üçin möhüm bolan senagat robotlarynyň uzak möhletleýin durnukly ulanylmagyny kepillendirýär.
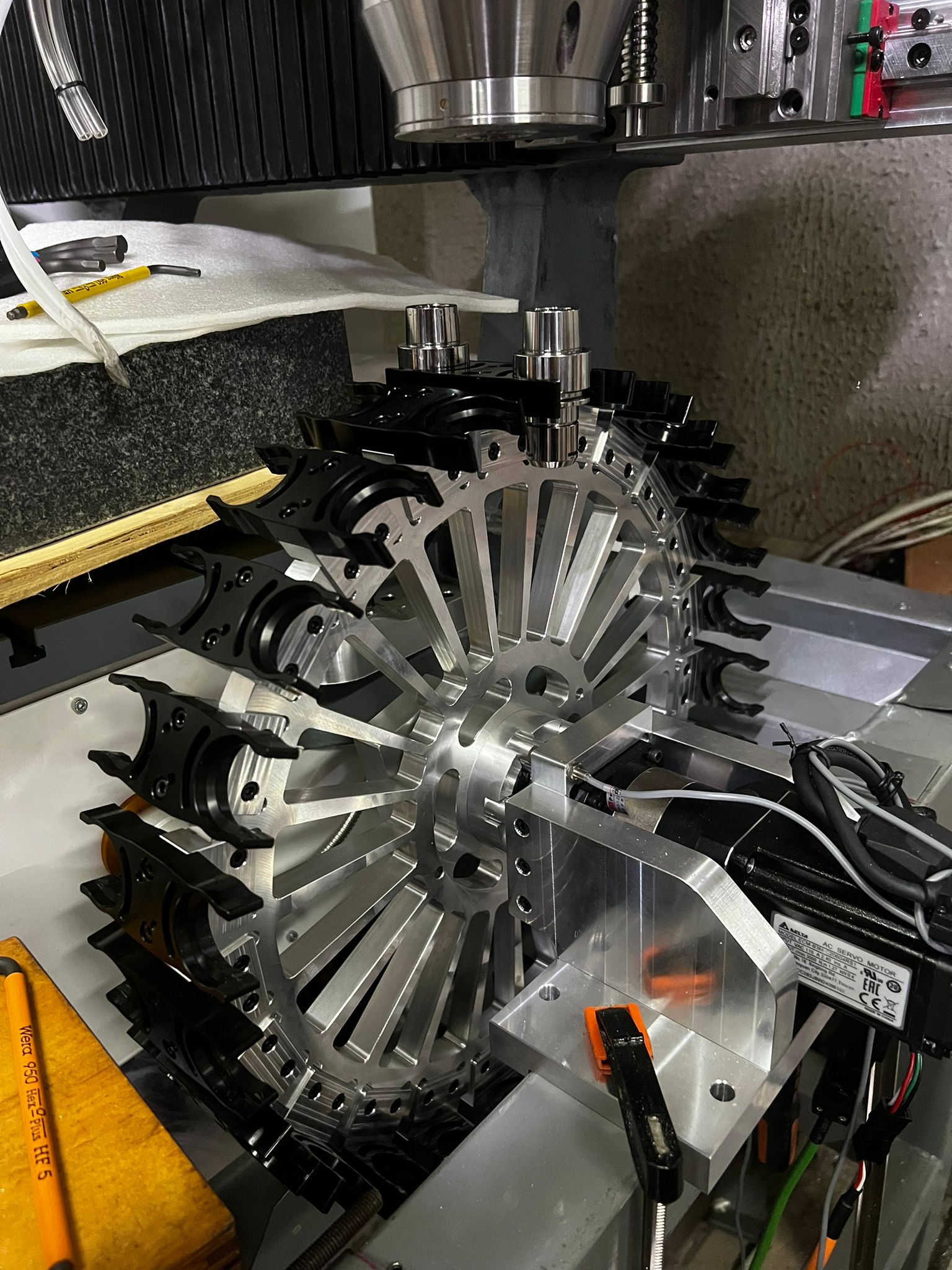
Aşakdaky mysalda, 400W sero + PLF seriýaly dişli guty ulanylýar. Işleýän inertiýa gaty uly bolanda, dişli aňsatlyk bilen zaýalanýar.
1-nji mesele: Motor gaty gysga wagtyň içinde zerur momenti çykaryp bilmeýär.
2-nji mesele, PLF seriýasy dişli döwülmegine sebäp bolýan şeýle uly inersiýa çydap bilmez.
3, iş wagtynda arassalamak gaty uly. Motor adaty däl titreýär. Görkezilen ýagdaýa takyk ýetip bolmaz.
Çözgüt:
1, PLX090 reduktor + 750W servo motoryny çalyşyň, peseliş derejesini ýokarlandyryň. Inersiýany ýokarlandyryň.
2, NT130 içi boş aýlaw tapgyry + 400W serw motoryny ulanyň. Operationuwaş işlemek we takyklygy ýokarlandyrmak.
3, NT200 + 1000W serw motoryny ulanyň. Hiç hili töwekgelçiliksiz. Takyklyk we tork ulaldyldy. Bu ätiýaçlandyryş çözgüdi. In engineenerlerimiz üçünji çözgüdi maslahat berýärler.
Bukjanyň mazmuny
1 x merjen pagta goragy
Şokdan goraýan 1 x köpük
1 x ýörite karton ýa-da agaç guty









